EMPA Workshop’a hoşgeldiniz, bu yazıda SensNode’un üzerinde bulunan sensörleri ve entegreleri nasıl kullanılacağı anlatılacaktır. Lütfen önceki yazımızdaki ( EMPA Workshop’a gelmeden önce yapılıcaklar) talimalatları eksiksiz yaptığınızdan emin olunuz.
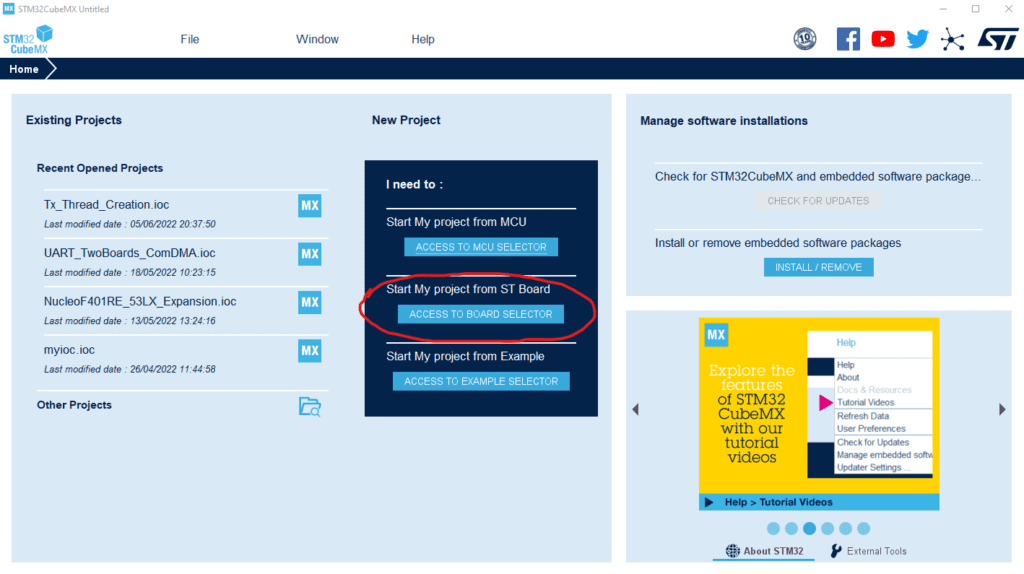
1- Bilgisayarınızda yüklü olan STM32CubeMX programını açınız. Sonrasında Acces to Board Selector seçeneğine tıklayanız.
2- Açılan pencere kullanacağımız board olan NUCLEO-U575ZI-Q boardunu Commercial Part Number bölgesinde aratıp. Board List’de çıkana çift tıklayınız ve pop-upda Yes seçeneğine tıklayınız.
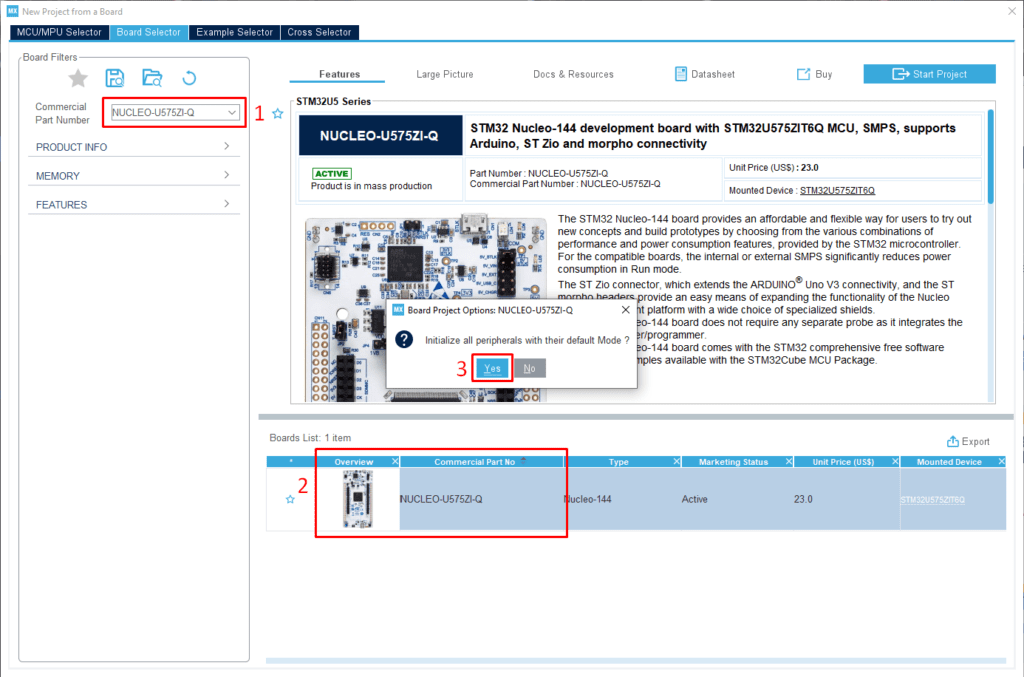
3- Trustzone Feature pop’u çıktığından Without TrustZone activated seçeneğini seçiniz.
4- Seçtiğimiz Boardun Config sayfası karşımıza geldiğinde sistemi hazırlamaya başlayabiliriz.
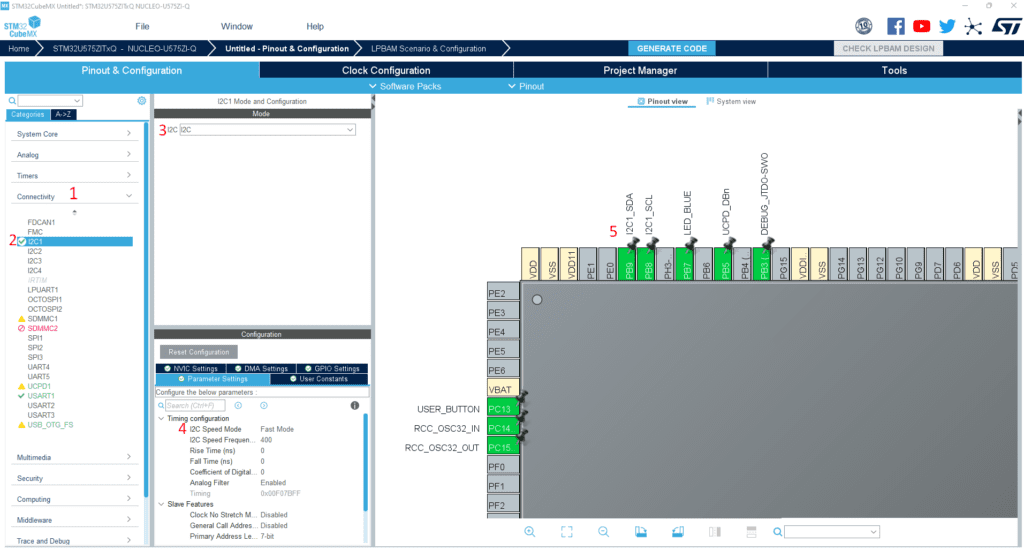
5- ilk Connectivityden başlayacağız. Connectivity sekmesinden I2C1 sekmesine girip defaultda disable olan I2C seçeneğini I2C olarak ayarlayın. Ve Parameter Settings kısmından I2C speed Mode‘unu Fast Mode olarak seçiniz. Pinout View kısmında pinleri değiştirmeniz gerekecektir. Bu sistemde PB9 ve PB8 pinleri I2C olarak seçilmiştir. Pinlere tıklayıp I2C1 seçeneklerini seçiniz.
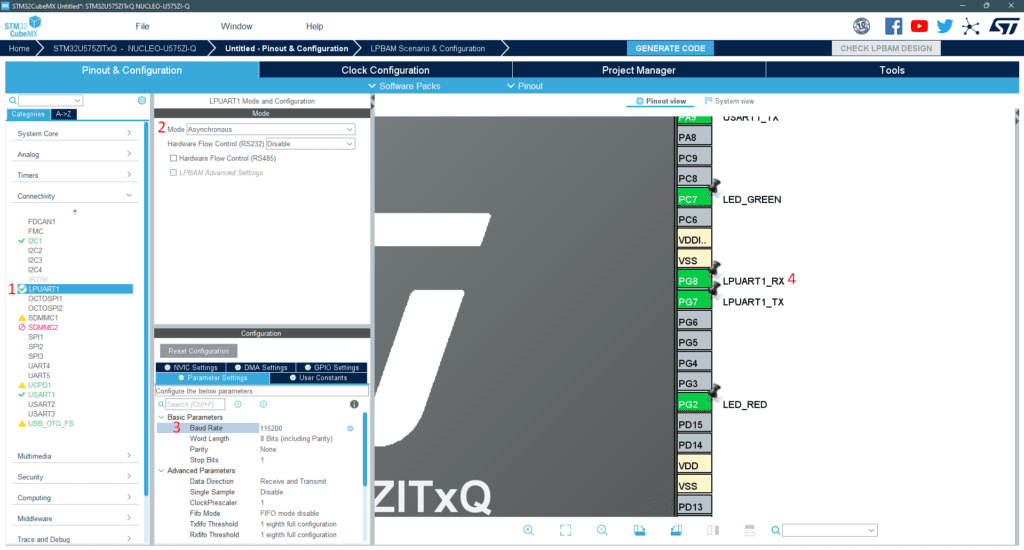
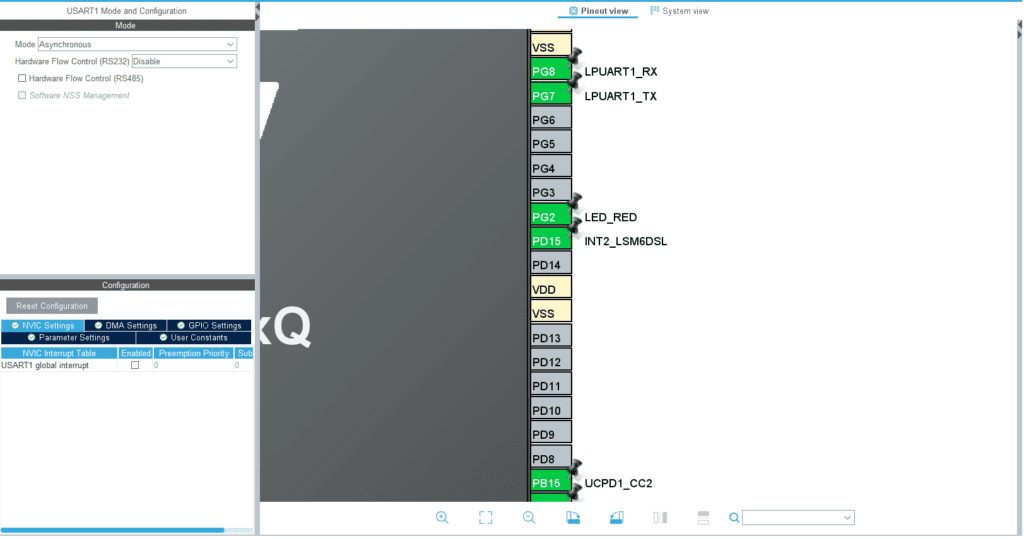
6- ESP32 ve STM32 arasındaki uart bağlantısını kurmak için LPUART seçeneğini aktif etmemiz lazım. LPUART1 seçeneğini seçip Mode olarak Asynchronous modunu seçiniz. Baud Rate seçeneğini 115200 olarak belirleyiniz. Ve Pinout Viewdan PG8 ve PG7 pinlerini LPUART1_RX ve Tx olarak seçiniz.
7- Sırada GPIO ayarları yapılacaktır. Pinout View‘dan Önce Interruptlarımızı ayarlayalım. Bir pin interrupt olarak seçmek için GPIO_EXTIx olarak seçmeniz gerekmektedir.
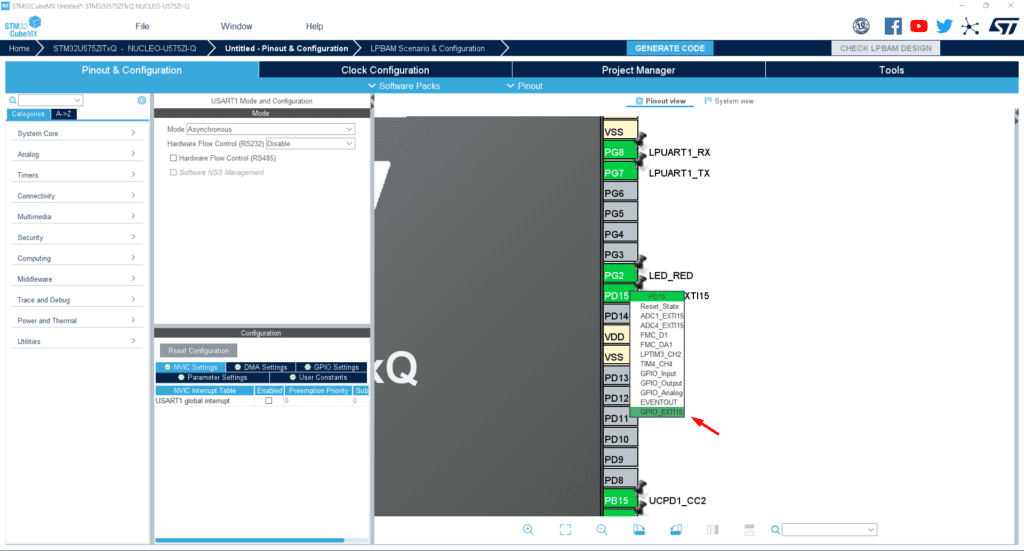
8- Pinin üstüne gelip sağ tıkladığımızda çıkan menüden Enter User Label ile istediğiniz bir isim yazabilirsiniz. PD15 boardumuzda LSM6dsl’nin ikinci interrupt pinidir.
9- Az önceki adımlarda yaptığımız şekilde diğer sensörlerin de interrupt pinlerini ayarlamalısınız. Aşağıdaki listede yer alan pinleri 7. ve 8. adımlarda gösterildiği gibi ayarlayabilirsiniz.
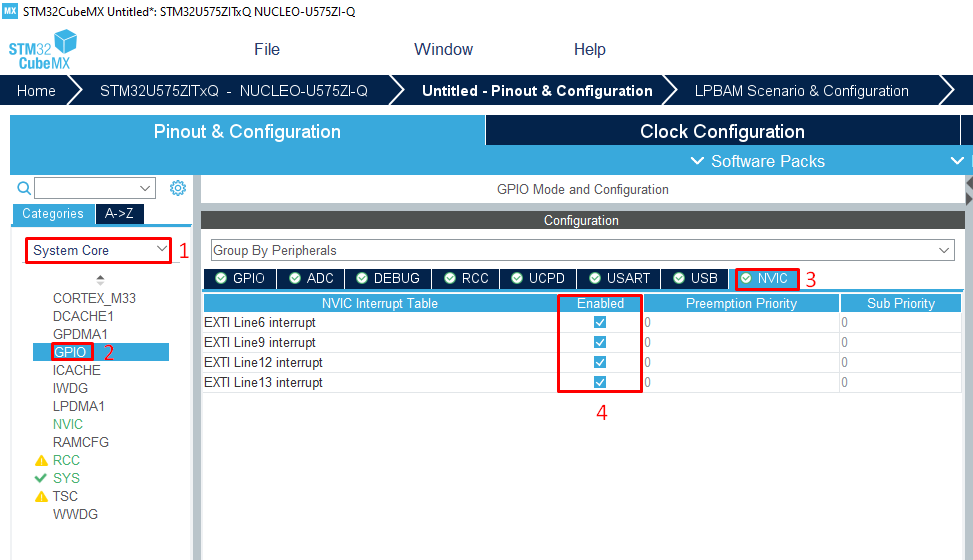
10- Interrupt pinlerinizi ayarladıktan sonra System Core sekmesindeki GPIO kısmından NVIC Interruptlarınızı etkinleştirmelisiniz. Ayarladığımız pinlerin lineları otomatik olarak NVIC sekmesine gelecek, bunları etkinleştiriniz.
11- İnterruptlarımızı ayarladıktan sonra normal Output Pin ayarlarını yapabiliriz. Pinout Viewdan kullanacağımız pinleri istediğimiz pinlere sol tıklayarak GPIO_Output seçeneğini seçerek ayarlayabiliriz. GPIO pinlerinize User Label koymak kodunuzda portları bulmanızı kolaylaştıracaktır.
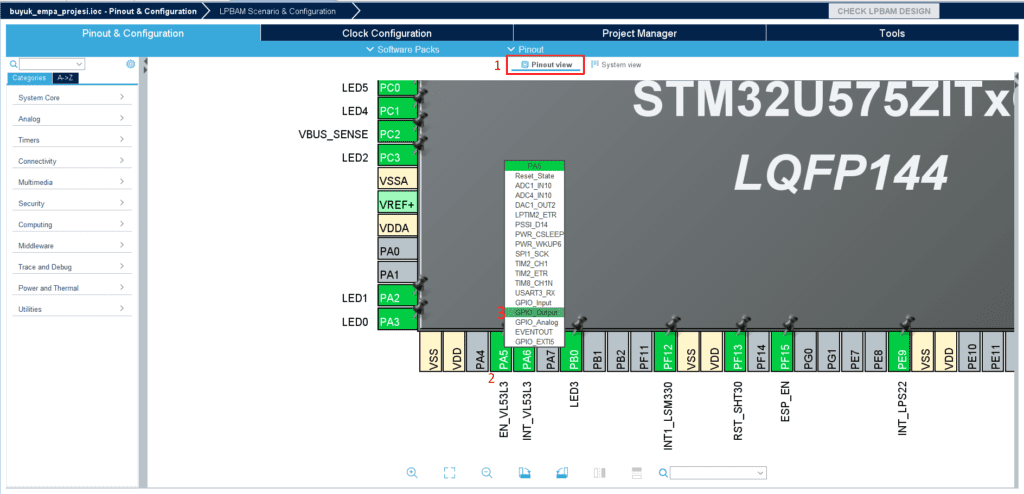
12- Az önceki adımlarda yaptığımız şekilde diğer GPIO Output pinlerini ayarlamalısınız. Aşağıdaki listede yer alan pinleri 11. adımda gösterildiği gibi ayarlayabilirsiniz.
Pinleri kolayca bulmak için Pinout view pencersinin aşağısındaki arama barını kullanabilirsiniz.
14- SensNode Frameworkünü kodumuz ile oluşturmak için Software Packs seçeneğinin altından Select Components’a tıklayalım.
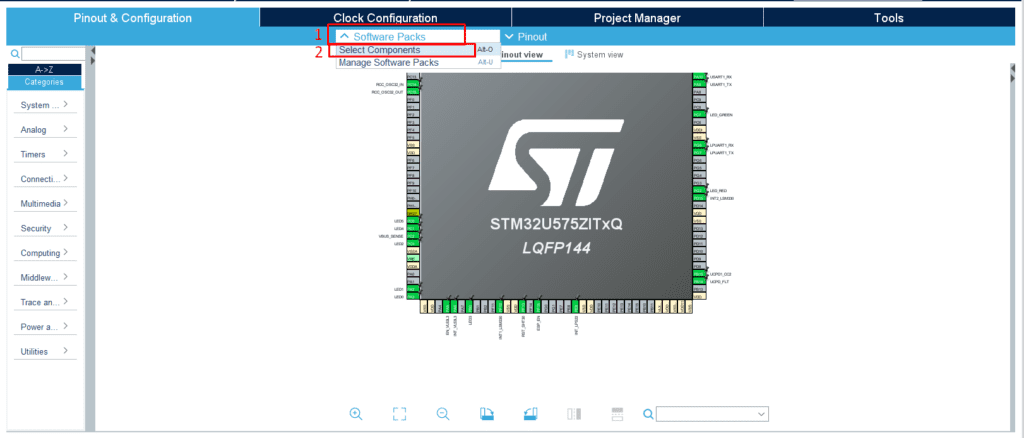
15- Açılan pencereden SensNode paketinin altındaki boş kutuyu tickleyiniz.
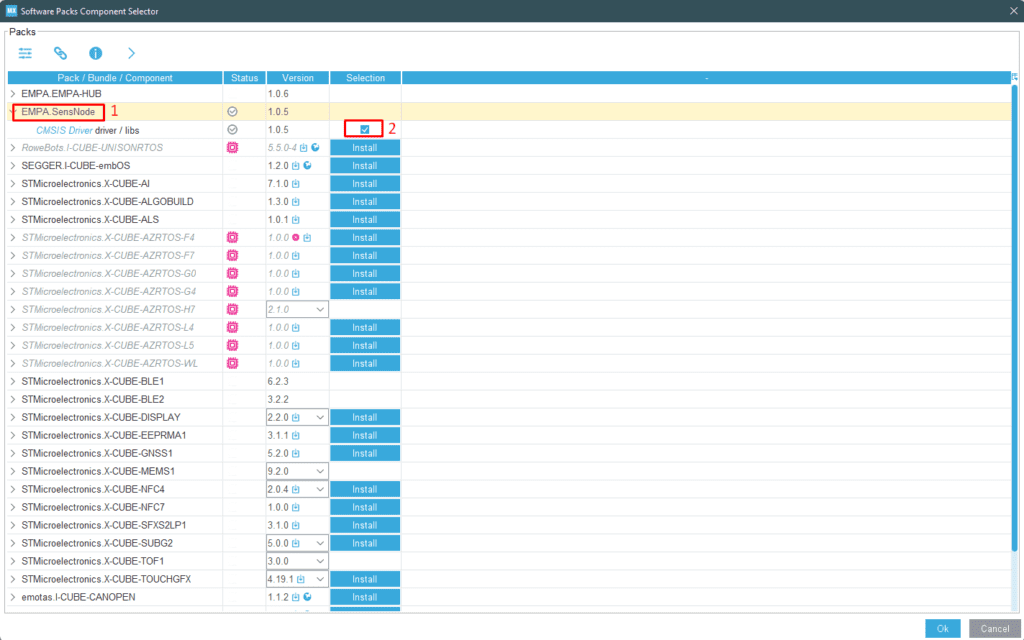
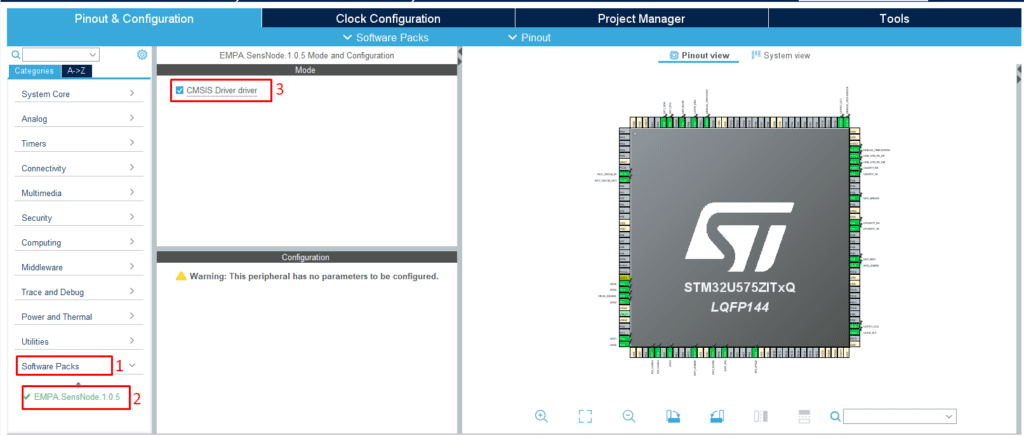
16- Ok tuşuna bastıktan sonra ana menunüzde sol tarafta yeni bir sekme açıldığını görüceksiniz. Software Packs sekmesi altından SensNode paketini seçip CMSIS Driver seçeneğini işaretleyiniz.
13- I2C, LPUART, Interrupt pinleri, Output pinleri ve SensNode paketini hazırladığımıza göre Programımızı generateleyebiliriz. Project Manager sekmesinden öncelikle Project Name kısmını dolduruyoruz. Sonrasında Toolchain/IDE olarak STM32CUBEIDE seçeneğini seçiyoruz. Son olarak Generate Code düğmesine basıyoruz.
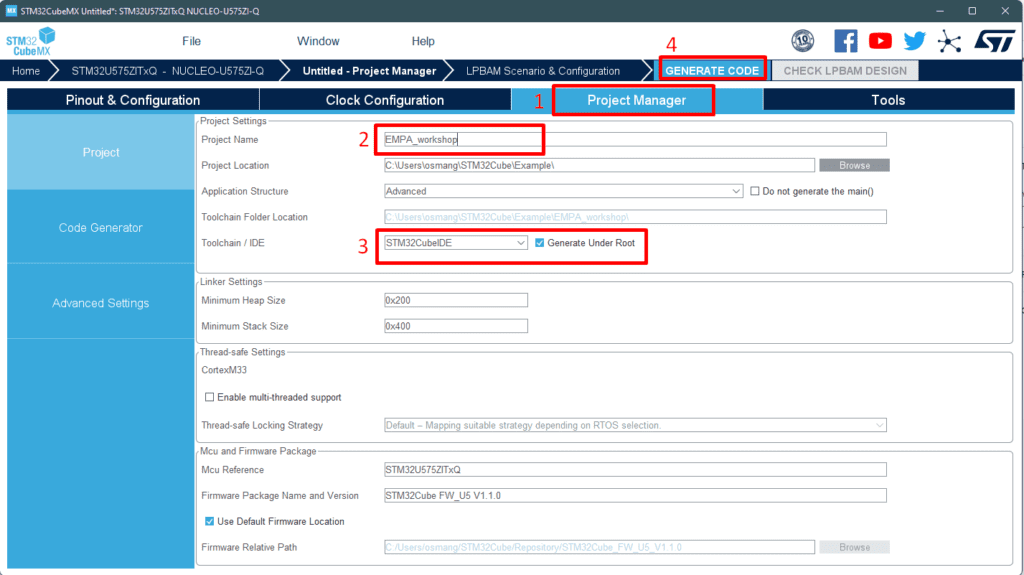
Böylelikle sistemizin konfigürasyon dosyalarının da olduğu kodumuz generatelenmiştir. Sırada Sensörlerin çalıştırılması vardır.
SensNode üzerindeki sensörlerden veri çekmenin ve interruptların ayarlanması anlatılacaktır.
Aşağıdaki kodu main.c dosyasının içindeki belirtilen yerlere kopyalayınız. Main.c dosyamız içerisinde User Codelarını yazabildiğimiz ve program generatorın dokumandığı alanlar vardır. Bizde kodlarımızı bu gerekli yerlere yapıştıracağız.
Öncelikle header dosyalarımızı eklemek için /* USER CODE BEGIN Includes */ alanının altına yapıştıracağız
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "sensError.h"
#include "sensEnv.h"
#include "sensMotion.h"
#include "vl53lx_api.h"
/* USER CODE END Includes */
Bu kodumuzda Pre-define kullanılıcaktır. #define ile gerekli yerlerin compilera girip girmeyeceğini ayarlayabileceğiz.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define SHT_POLL
/* USER CODE END PD */
Loglarımızı printf yardımıyla almak için aşağıdaki kodu ekleyiniz.
/* USER CODE BEGIN PV */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
PUTCHAR_PROTOTYPE {
/* Place your implementation of fputc here */
/* e.g. write a character to the USART2 and Loop until the end of transmission */
while (HAL_OK != HAL_UART_Transmit(&huart1, (uint8_t*) &ch, 1, 30000)) {
;
}
return ch;
}
/* USER CODE END PV */SHT pollingini bir fonksiyon içerisinde yapacağız. Bu fonksiyonun prototipini gerekli yere yazalım.
/* USER CODE BEGIN PFP */
#ifdef SHT_POLL
void sht_polling_main(void);
#endif
/* USER CODE END PFP */
SHT30 fonksiyonu main içerisinde çağıracağımız yer whiledan hemen öncedir.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef SHT_POLL
sht_polling_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
Son olarak fonksiyonumuzun kendisini yazabiliriz. Bunun için /* USER CODE BEGIN 4 */ bölgesini kullanacağız.
/* USER CODE BEGIN 4 */
#ifdef SHT_POLL
void sht_polling_main(void) {
// Sens_Error for error handling
Sens_Error_t err = SENS_FAILS;
//Polling function require float data
float temperature, humidity;
//Initializing the SHT30
err = SHTSensInit(&hi2c1);
if (err != SENS_SUCCESS) {
printf("Error when polling data. Error code:(%d)", err);
Error_Handler();
}
//infinite loop
while (1) {
//Polling data
err = read_SHT30(&hi2c1, &temperature, &humidity);
if (err != SENS_SUCCESS) {
printf("Error when polling data. Error code:(%d)", err);
} else {
printf("Temperature: %dC, Humidity:%d%RH\n\r ", (int) temperature,
(int) humidity);
}
HAL_Delay(2000);
}
}
#endif
/* USER CODE END 4 */
Bu fonksiyon içerisinde 2 saniyede bir sıcaklık ve nem verisi pollanıp ekrana basılması planlanmıştır.
SHT sensörünü initializelayabilmek için SHTSensInit(&hi2c1); fonksiyonunu çağırıyoruz. Datayı Pollamak için is read_SHT30(&hi2c1, &temperature, &humidity); kodunu kullanıyoruz.
STM32Cubeİde içerisinde üsteki taskbardan Run tuşuna basarak programı yükleyebilirsiniz.
Bir sonraki kod’a geçmeden önce #define SHT_POLL satırını yoruma alarak bu yaptıklarımızı derlemeden çıkarabiliriz.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//#define SHT_POLL
/* USER CODE END PD */
Bir önceki kodda define satırını yorumladığımız için aynı main.c dosyasını bir önceki kod ile karıştırmadan yazabiliriz. Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LPS_POLL
/* USER CODE END PD */Kullanacağımız fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LPS_POLL
void lps_polling_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
/* USER CODE BEGIN 2 */
*
*
*
#ifdef LPS_POLL
lps_polling_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Şimdi sırada fonksiyonumuz oluşturalım.
/* USER CODE BEGIN 4 */
#ifdef LPS_POLL
void lps_polling_main(void) {
// Sens_Error for error handling
Sens_Error_t err = SENS_FAILS;
int i;
//Polling function require float data
float temperature, pressure;
//Initializing the LPS
err = LpsSensInit(&hi2c1);
if (err != SENS_SUCCESS) {
Error_Handler();
}
//Setting the ODR for data polling
LPS_Enable(&hi2c1);
while (1) {
err = read_LP22(&hi2c1, &temperature, &pressure);
if (err != SENS_SUCCESS) {
printf("Error when polling data. Error code:(%d)", err);
} else {
printf("Temperature: %dC, Pressure:%dhPa\n\r ", (int) temperature,
(int) pressure);
}
HAL_Delay(2000);
}
}
#endif
/* USER CODE END 4 */Bu fonksiyonda 2 saniye aralıklar ile sıcaklık ve basınç verileri ekrana yazılması planlanmıştır.
“LpsSensInit(&hi2c1);” ile sensörümüzü initialize ediyoruz. SHT aksine LPSnin ODR (sampling rate) ayarını yapabiliyoruz, bunu kullanarak sensörün veri almasını durdurabiliriz. Sensörün veri almasını açmak için LPS_Enable(&hi2c1); fonksiyonunu çağırıyoruz. Sıcaklık ve Basınç değerlerini okumak için read_LP22(&hi2c1, &temperature, &pressure); fonksiyonunu kullanabiliriz.
Bir önceki kodda yaptığımız gibi LPS_POLL definenı yoruma alalım.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//#define LPS_POLL
/* USER CODE END PD */
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LSM_POLL
/* USER CODE END PD */Kullanacağımız fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LSM_POLL
void lsm_polling_main(void);
#endif
/* USER CODE END PFP */
Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef LSM_POLL
lsm_polling_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Şimdi sırada fonksiyonumuz oluşturalım.
/* USER CODE BEGIN 4 */
#ifdef LSM_POLL
void lsm_polling_main(void) {
// Sens_Error for error handling
Sens_Error_t err = SENS_FAILS;
//Initializing the LSM
err = LSMSensInit(&hi2c1);
if (err != SENS_SUCCESS) {
Error_Handler();
}
uint8_t sw = 0;
uint8_t cnt = 0;
// Sensör verileri için ayrılan yer
float acc[3] = { 0 };
float gyro[3] = { 0 };
while (1) {
if (sw == 0) {
if (cnt == 0) {
printf("Accelerator Enabled\n\r");
// İvme senörünün ODRını açıyoruz
ACC_Enable(&hi2c1);
}
read_acc(&hi2c1, acc); // ivme verisinin okunması
printf("AccX = %d, AccY = %d, AccZ = %d\n\r", (int) acc[0],
(int) acc[1], (int) acc[2]);
cnt++;
if (cnt == 9) {
printf("Accelerator Disabled\n\r");
ACC_Disable(&hi2c1); // ivme odrını durduruyoruz
cnt = 0;
sw = 1;
}
}
if (sw == 1) {
if (cnt == 0) {
// gyro senörünün ODRını açıyoruz
GYRO_Enable(&hi2c1);
printf("Gyro Enabled\n\r");
}
read_gyro(&hi2c1, gyro); // Gyro verisini okunması
printf("GX = %d, GY = %d, GZ = %d\n\r", (int) gyro[0],
(int) gyro[1], (int) gyro[2]);
cnt++;
if (cnt == 9) {
printf("Gyro Disabled\n\r");
GYRO_Disable(&hi2c1); // Gyro odrını durduruyoruz
cnt = 0;
sw = 0;
}
}
HAL_Delay(1000);
}
}
#endif
/* USER CODE END 4 */Bu fonksiyonda 10 veride bir gyro meter ve accelerometer arasında togglelama yapılmıştır. LSMSensInit(&hi2c1); fonksiyonu ile sensörümüzü hazırlıyoruz. Accelerometer ve gyro meter ODRlarını ayrı olarak setleyebiliyoruz. Bu iki sensörün veri almasını açmak için Enable komutlarını kullanıyoruz. Güç tasarufu için ODRlarını kapatabildiğimiz Disable fonksiyonları da bulunmaktadır. Sensörlerin verilerini okumak için read fonksiyonlarını çağırabilirsiniz.
ToF’a geçmeden önce LSM_POLL’un definelandığı yeri yorumlayınız
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define TOF_POLL
/* USER CODE END PD */Kullanacağımız fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef TOF_POLL
void tof_polling_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef TOF_POLL
tof_polling_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Şimdi sırada fonksiyonumuz oluşturalım.
/* USER CODE BEGIN 4 */
#ifdef TOF_POLL
void tof_polling_main(void) {
VL53LX_Dev_t dev;
VL53LX_DEV Dev = &dev;
VL53LX_MultiRangingData_t MultiRangingData;
VL53LX_MultiRangingData_t *pMultiRangingData = &MultiRangingData;
uint8_t NewDataReady = 0;
int no_of_object_found = 0, j;
int status;
uint8_t byteData;
uint16_t wordData;
printf("VL53L1X Examples...\n\r");
Dev->I2cHandle = &hi2c1;
Dev->I2cDevAddr = 0x52;
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 1); // ToF sensörünün resetlenmesi
HAL_Delay(10);
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 0); // ToF sensörünün resetlenmesi
HAL_Delay(10);
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 1); // ToF sensörünün resetlenmesi
HAL_Delay(10);
VL53LX_RdByte(Dev, 0x010F, &byteData); //Module id address
printf("VL53LX Model_ID: %02X\n\r", byteData);
VL53LX_RdByte(Dev, 0x0110, &byteData); // Module type address
printf("VL53LX Module_Type: %02X\n\r", byteData);
VL53LX_RdWord(Dev, 0x010F, &wordData);
printf("VL53LX: %02X\n\r", wordData);
status = VL53LX_WaitDeviceBooted(Dev); // Sensörün boot olması bekleniyor
status = VL53LX_DataInit(Dev); // Sensör initialize ediliyor
status = VL53LX_StartMeasurement(Dev); // ToF sensörü ölçümü başlatılır
if (status) {
printf("VL53LX_StartMeasurement failed: error = %d \n", status);
while (1)
;
}
while (1) {
status = VL53LX_GetMeasurementDataReady(Dev, &NewDataReady); //Datayı çekilmesi için hazırlar
HAL_Delay(1); // 1 ms polling period, could be longer.
status = VL53LX_GetMultiRangingData(Dev, pMultiRangingData); // Veriyi çeker
no_of_object_found = pMultiRangingData->NumberOfObjectsFound;
printf("Count=%5d, ", pMultiRangingData->StreamCount);
printf("#Objs=%1d ", no_of_object_found);
for (j = 0; j < no_of_object_found; j++) {
if (j != 0)
printf("\n ");
printf(
// @suppress("Float formatting support")
"status=%d, D=%5dmm, Signal=%d Mcps, Ambient=%d Mcps j: %d",// @suppress("Float formatting support")
pMultiRangingData->RangeData[j].RangeStatus,
pMultiRangingData->RangeData[j].RangeMilliMeter,
pMultiRangingData->RangeData[j].ExtendedRange);
}
printf("\n");
if (status == 0) {
status = VL53LX_ClearInterruptAndStartMeasurement(Dev);
}
HAL_Delay(500);
}
}
#endif
/* USER CODE END 4 */Bu fonksiyonda uzaklık verisi ToF sensöründen alınıp ekrana basılıyordur. Sensör resetlendikten sonra bootlanması beklenmesi lazım, sonrasında VL53LX_DataInit(Dev) ile sensörün ayarları yapılır. VL53LX_StartMeasurement(Dev) fonksiyonu ile device ölçümlere başlar.
Datayı hazırlamak için öncelikle VL53LX_GetMeasurementDataReady(Dev, &NewDataReady) fonksiyonu kullanılır sonrasında dataready olunca VL53LX_GetMultiRangingData(Dev, pMultiRangingData) fonksiyonu ile veriler çekilir. Yeni bir ölçüm başlatmak için VL53LX_ClearInterruptAndStartMeasurement(Dev) fonksiyonu kullanılır.
Bir sonraki kod’a geçerken define’ı yoruma alınız.
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LPS_INT
/* USER CODE END PD */fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LPS_INT
void lps_int_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef LPS_INT
lps_int_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Fonksiyonumuzu bize ayrılan yerde yazabiliriz.
/* USER CODE BEGIN 4 */
#ifdef LPS_INT
void lps_int_main(void) {
Sens_Error_t err = SENS_FAILS;
float temperature, pressure;
err = LpsSensInit(&hi2c1);
if (err != SENS_SUCCESS) {
Error_Handler();
}
LPS_Enable_int(&hi2c1);
while(1){
}
}
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin) {
lps22df_fifo_data_t data[5];
int l = 0;
if (GPIO_Pin == INT_LPS22_Pin) {
LPS_fifo_read(&hi2c1, 5, data);
printf("[\n\r");
for (l = 0; l < 5; l++) {
printf("pre %d : %dhPa \n\r", l, (int) (data[l].hpa));
}
printf("]\n\r");
}
}
#endif
/* USER CODE END 4 */LPS22df’nin bu örneğinde watermarkı 5 olan bir fifo yapılmıştır. Sistemin Interrupt üretmesi içinde watermark seviyesinin ulaşılması ayarlanmıştır. LPS_Enable_int(&hi2c1) ile fifo ve interruptları ayarlayabilirsiniz daha watermark seviyesini fonksiyon içerisinden değiştirebilirsiniz.
Sisteme bir interrupt geldiğinde sistem Callback fonksiyonlarını çağırır. Interruptı almamız için kullanacağım callback fonksiyonu yukarıdadır. Bu fonksiyon içerisinde basit bir if branchi ile Interruptın beklediğimiz yerden gelip, gelmediği kontrol edilebilir. LPS_fifo_read(&hi2c1, 5, data) fonksiyonu ile fifo içerisindeki veriler data variablının içerisine yazılır..
Bir sonraki kod’a geçerken define’ı yoruma alınız.
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LSM_INT
/* USER CODE END PD */fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LSM_INT
void lsm_int_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef LSM_INT
lsm_int_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Fonksiyonumuzu bize ayrılan yerde yazabiliriz.
/* USER CODE BEGIN 4 */
#ifdef LSM_INT
#define GYRO 0
uint8_t fifoReady = 0;
void lsm_int_main(void) {
Sens_Error_t err = SENS_FAILS;
fifoReady = 0;
LSMSensInit(&hi2c1);
err = LSM_Fifo_Enable(&hi2c1, GYRO);
while(1){
if(fifoReady){
LSM_fifo_get_data(&hi2c1);
fifoReady = 0;
}
}
}
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == INT1_LSM330_Pin) {
fifoReady = 1;
}
}
#endif
/* USER CODE END 4 */Bu kodda GYRO verilerinin fifo ile seçilen watermak kadar doldurulup interrupt vermesi ayarlanmıştır. LSM_Fifo_Enable(&hi2c1, GYRO) ile GYRO verileri fifoya yazılır. Bu veriler LSM_fifo_get_data(&hi2c1) ile gyro verileri için olan değerler çekilir ve bastırılır.
Bir sonraki kod’a geçerken define’ı yoruma alınız.
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LSM_Single_Double
/* USER CODE END PD */fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LSM_Single_Double
void lsm_single_double(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef LSM_Single_Double
lsm_single_double();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Fonksiyonumuzu bize ayrılan yerde yazabiliriz.
/* USER CODE BEGIN 4 */
#ifdef LSM_Single_Double
void lsm_single_double(void) {
Sens_Error_t err = SENS_FAILS;
err = LSMSensInit(&hi2c1);
LSM_Enable_Single_Tap_Detection(&hi2c1, LSM6DSL_INT1_PIN);
LSM_Enable_Double_Tap_Detection(&hi2c1, LSM6DSL_INT2_PIN);
while(1){
}
}
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == INT1_LSM330_Pin) {
printf("Single Tap\n\r");
}
if (GPIO_Pin == INT2_LSM330_Pin) {
printf("Double Tap\n\r");
}
}
#endif
/* USER CODE END 4 */Bu fonksiyonda iki farklı interrupt hazırlanmıştır. Single ve Double olarak ayrılan bu iki interrupt LSM6dslnin iki ayrı interrupt pininden geliyor. Detectionlar açıldıktan sonra Callback fonksiyonunda hangi pinden geldiğine bakılarak interrupt türü ayırt edilebilir.
Bir sonraki kod’a geçerken define’ı yoruma alınız.
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LSM_6D_OR
/* USER CODE END PD */Fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef LSM_6D_OR
void lsm_6d_orientation_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef LSM_6D_OR
lsm_6d_orientation_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Fonksiyonumuzu bize ayrılan yerde yazabiliriz.
/* USER CODE BEGIN 4 */
#ifdef LSM_6D_OR
uint8_t fifoReady = 0;
void lsm_6d_orientation_main(void) {
Sens_Error_t err = SENS_FAILS;
err = LSMSensInit(&hi2c1);
LSM_6D_Oriented_Enable(&hi2c1, LSM6DSL_INT1_PIN);
uint8_t xh,xl,yh,yl,zh,zl;
fifoReady = 0;
while (1) {
if (fifoReady) {
LSM_6D_Get_XL(&hi2c1, &xl);
LSM_6D_Get_XH(&hi2c1, &xh);
LSM_6D_Get_YL(&hi2c1, &yl);
LSM_6D_Get_YH(&hi2c1, &yh);
LSM_6D_Get_ZL(&hi2c1, &zl);
LSM_6D_Get_ZH(&hi2c1, &zh);
HAL_GPIO_WritePin(LED0_GPIO_Port, LED0_Pin, yl);
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, xh);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, yh);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, xl);
printf("xh : %d , xl: %d , yh: %d , yl : %d , zh : %d , zl : %d \n\r", xh, xl, yh, yl, zh, zl);
fifoReady = 0;
}
}
}
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == INT1_LSM330_Pin) {
fifoReady = 1;
}
}
#endif
/* USER CODE END 4 */Bu fonksiyonda boardumuzun 45 derece bir açı değişikliği yaptığında bir interrupt vermesi sağlanıp eğim yönüne göre ledlere basılması sağlanmıştır. LSM_6D_Oriented_Enable(&hi2c1, LSM6DSL_INT1_PIN) ile interrupt 1. interrupt pini üzerinden verilir. interrupt geldiği vakit 6 farklı eğim get komutlarıyla bulunabilir.
Bir sonraki kod’a geçerken define’ı yoruma alınız.
Öncellikle yeni define değerimiz ekleyelim.
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define TOF_INT
/* USER CODE END PD */Fonksiyonun prototipini gerekli yere yazalım.
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#ifdef TOF_INT
void tof_int_main(void);
#endif
/* USER CODE END PFP */Main fonksiyonu içerisinde fonksiyonumuz whiledan önce çağıralım.
int main(void) {
*
*
*
/* USER CODE BEGIN 2 */
#ifdef TOF_INT
tof_int_main();
#endif
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Fonksiyonumuzu bize ayrılan yerde yazabiliriz.
/* USER CODE BEGIN 4 */
#ifdef TOF_INT
volatile int IntCount;
void tof_int_main(void) {
VL53LX_Dev_t dev;
VL53LX_DEV Dev = &dev;
VL53LX_MultiRangingData_t MultiRangingData;
VL53LX_MultiRangingData_t *pMultiRangingData = &MultiRangingData;
uint8_t NewDataReady = 0;
int no_of_object_found = 0, j;
int status;
IntCount = 0;
uint8_t byteData;
uint16_t wordData;
printf("VL53L1X Examples...\n\r");
Dev->I2cHandle = &hi2c1;
Dev->I2cDevAddr = 0x52;
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 1); // Reset ToF sensor
HAL_Delay(10);
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 0); // Reset ToF sensor
HAL_Delay(10);
HAL_GPIO_WritePin(EN_VL53L3_GPIO_Port, EN_VL53L3_Pin, 1); // Reset ToF sensor
HAL_Delay(10);
VL53LX_RdByte(Dev, 0x010F, &byteData);
printf("VL53LX Model_ID: %02X\n\r", byteData);
VL53LX_RdByte(Dev, 0x0110, &byteData);
printf("VL53LX Module_Type: %02X\n\r", byteData);
VL53LX_RdWord(Dev, 0x010F, &wordData);
printf("VL53LX: %02X\n\r", wordData);
status = VL53LX_WaitDeviceBooted(Dev);
status = VL53LX_DataInit(Dev);
status = VL53LX_StartMeasurement(Dev);
if (status) {
printf("VL53LX_StartMeasurement failed: error = %d \n", status);
while (1)
;
}
status = VL53LX_ClearInterruptAndStartMeasurement(Dev);
while (1) {
__WFI();
if (IntCount != 0) {
IntCount = 0;
status = VL53LX_GetMultiRangingData(Dev, pMultiRangingData);
no_of_object_found = pMultiRangingData->NumberOfObjectsFound;
printf("Count=%5d, ", pMultiRangingData->StreamCount);
printf("#Objs=%1d ", no_of_object_found);
for (j = 0; j < no_of_object_found; j++) {
if (j != 0)
printf("\n ");
printf( // @suppress("Float formatting support")
"status=%d, D=%5dmm, Signal=%2.2f Mcps, Ambient=%2.2f Mcps", // @suppress("Float formatting support")
pMultiRangingData->RangeData[j].RangeStatus,
pMultiRangingData->RangeData[j].RangeMilliMeter,
pMultiRangingData->RangeData[j].SignalRateRtnMegaCps
/ 65536.0,
pMultiRangingData->RangeData[j].AmbientRateRtnMegaCps
/ 65536.0);
}
printf("\n");
if (status == 0) {
HAL_Delay(100);
status = VL53LX_ClearInterruptAndStartMeasurement(Dev);
}
}
}
}
void HAL_GPIO_EXTI_Falling_Callback(uint16_t GPIO_Pin){
if (GPIO_Pin == INT_VL53L3_Pin) {
IntCount = 1;
}
}
#endif
/* USER CODE END 4 */Time of flight sensörü her data hazır olduğunda bir interrupt vererek haber veririr. Tof Polling ve bu interrupt kodunun arasındaki farklardan birisi dataready fonksiyonu gerekmez ve while loop’a girmeden önce interruptlar yenilenir.
SensNode üzerindeki belli interruptlar ve pollamalar gösterilmiştir. Sırada ThreadX’de basit bir program nasıl kurulacağı anlatılacaktır.
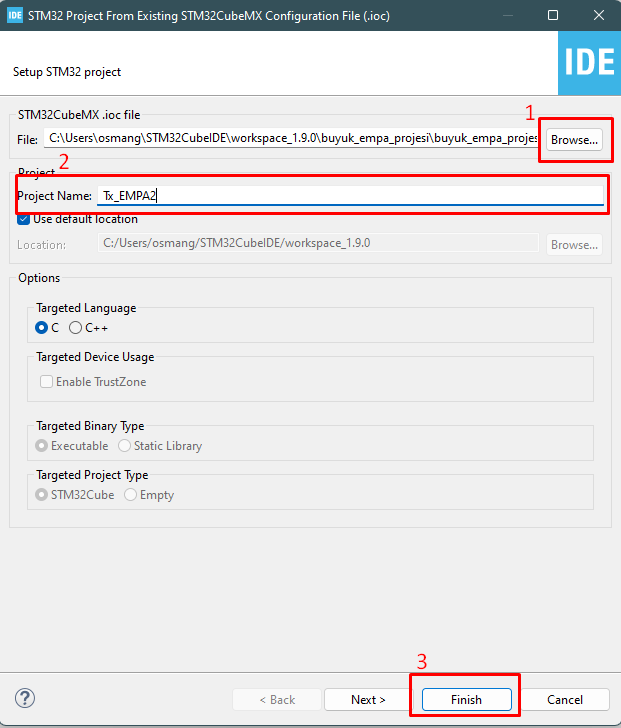
ThreadX kodunu oluşturmak için yeni bir proje başlatmamız gerekir. Pinler ve konfigürasyonları tekrar ayarlamamak için STM32CubeIDe içerisinde File->New->STM32 Project from existing ioc seçeneğini seçiniz.
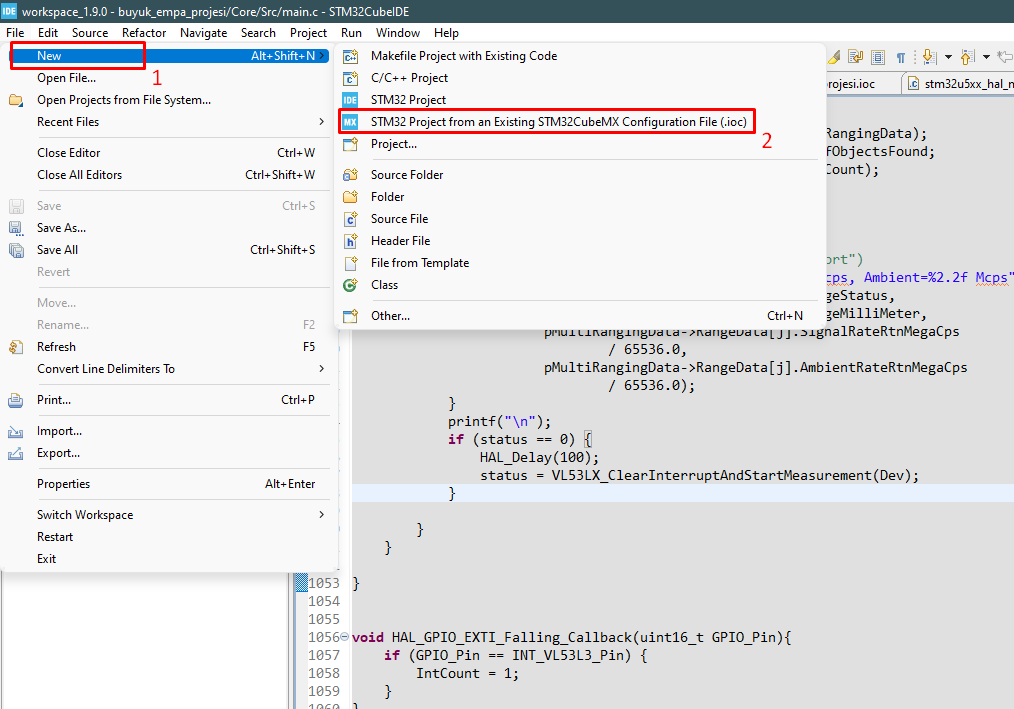
Karşınıza çıkan pencerede önceki projenizde kullandığınız iocyi STM32CubeMX .ioc file bölgesine giriniz. Yeni dosyanızın ismini belirledikten sonra Finish tuşuna basınız.
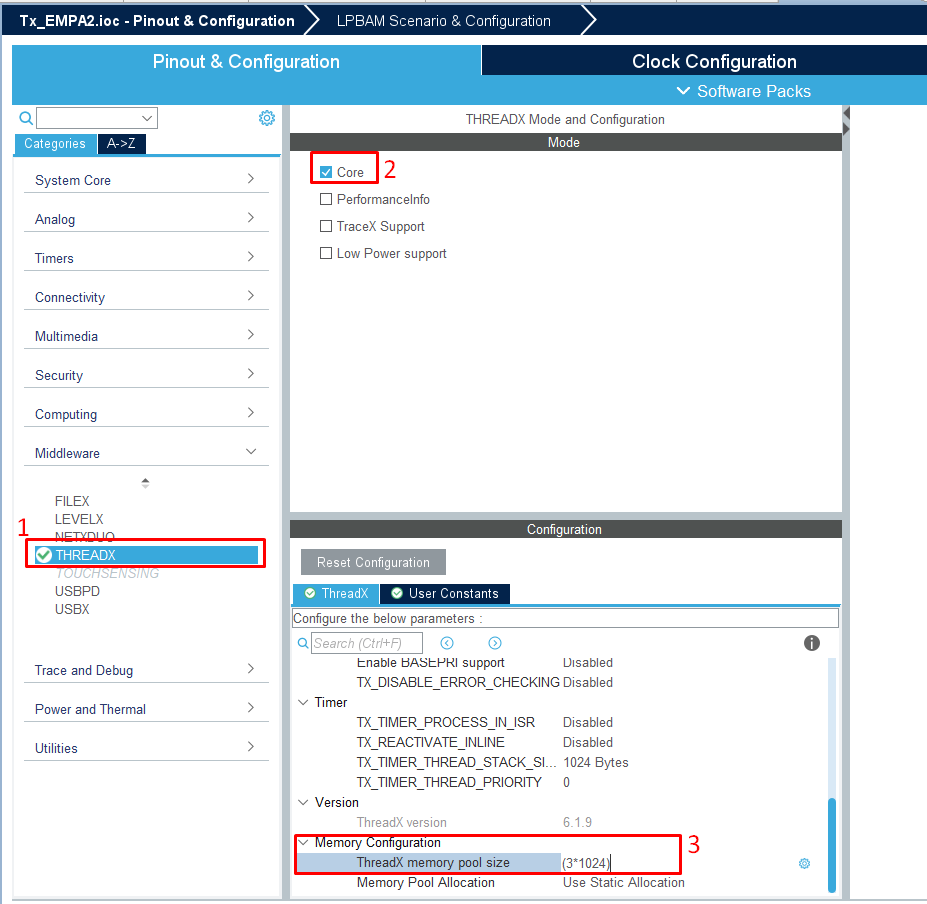
Karşınıza IOC ekranı gelince yapmanız gereken Middleware -> THREADX seçeneğine gidiniz. Sonra core seçeneğini aktif edin. Aşağıda açılan configuration sekmesinden Memory configuration bölümüne gidip ThreadX memory pool size kısmına (3*1024) değerini giriniz.
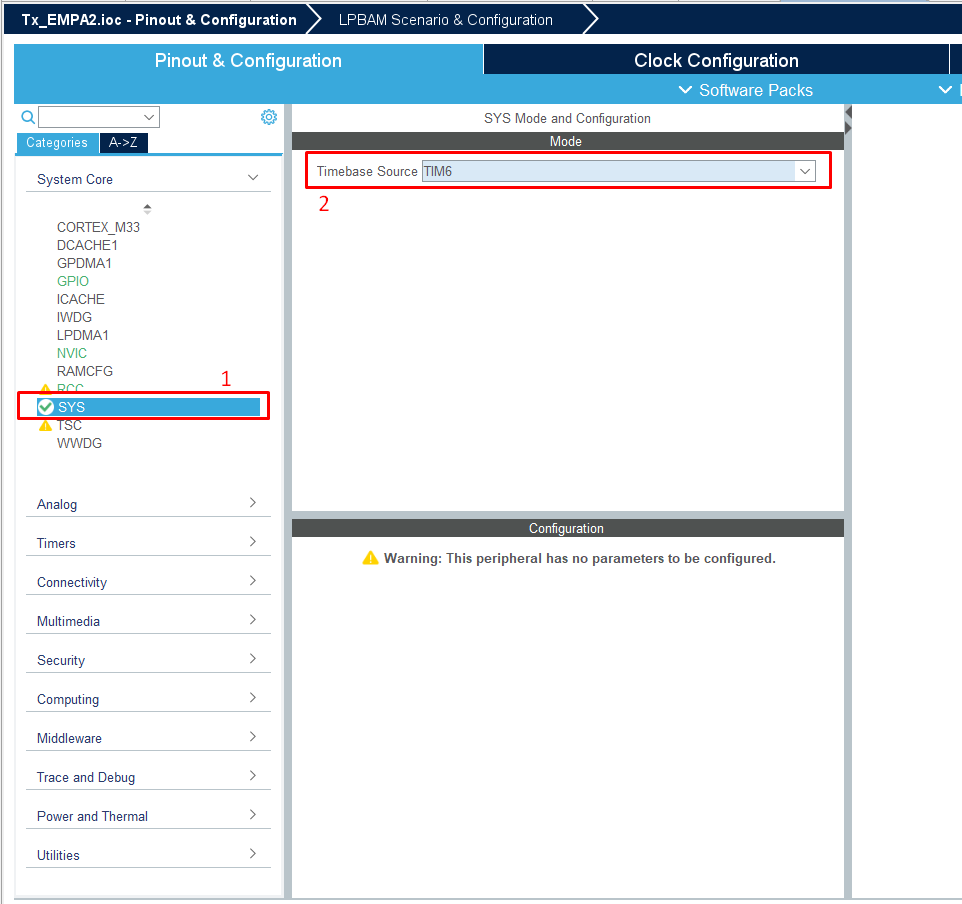
ThreadX Timebase source olarak systick tışında bir timer istiyor, bu yüzden TIM6 timerını Timebase source olarak kullanabilirsiniz.
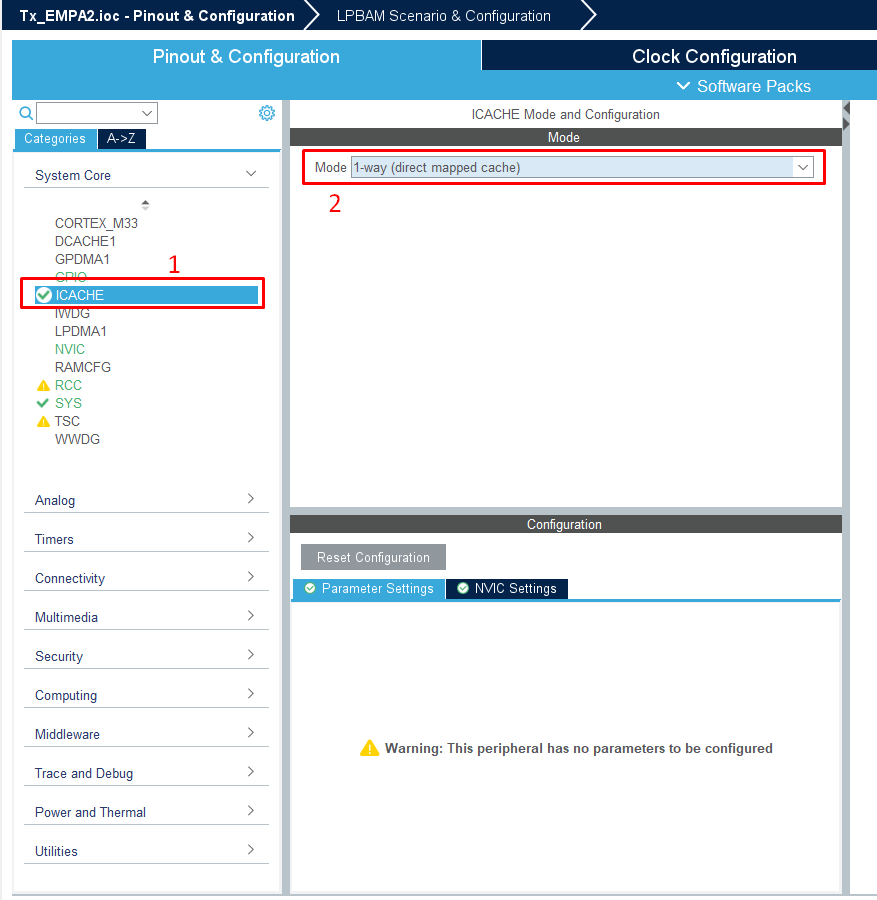
Sistemin daha optimize çalışması için ICACHE açılması öneriliyor.
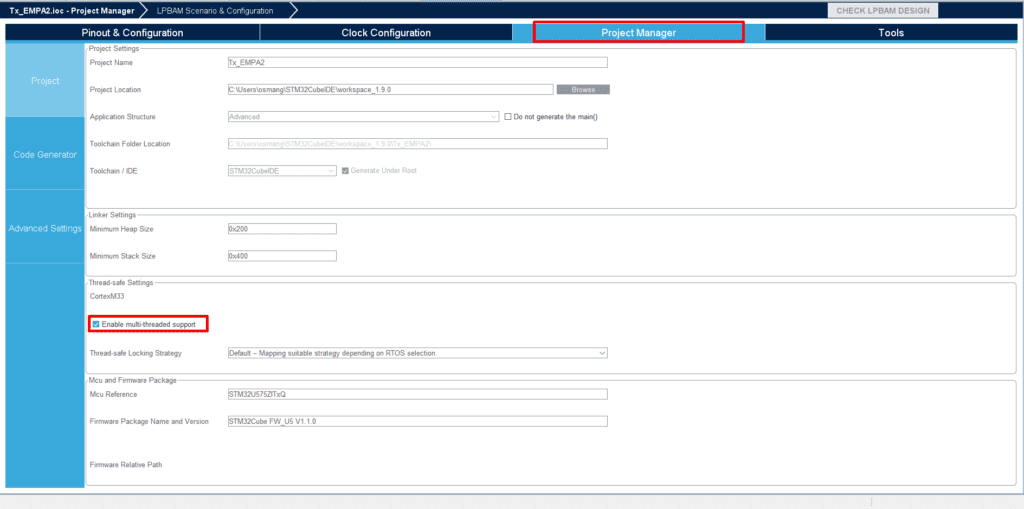
Üst sekmelerden Project Manager sekmesine gidiniz. Thread-Safe Setting kısmından Enable multi-threaded support seçeneğini açınız. Sonrasında programı generatelemek için (ctrl + S) yapınız.
Bu uygulamada yapmak istediğimiz iki ledin farklı threadler ile kontrol edilmesi ve farklı loglar vermesi yapılacaktır.
Öncelikle app_thread.c dosyasına gidelim. Pinleri ve APP Pool sizeı çekebilmek için aşağıdaki iki header dosyasını ekleyelim.
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "app_azure_rtos_config.h"
#include "main.h"
/* USER CODE END Includes */Definelarımız ayarlamak için app_thread.h dosyasına gidelim. Aşağıdaki defineları ekleyelim.
/* Private defines -----------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define APP_STACK_SIZE 1024
#define THREAD_ONE_PRIO 10
#define THREAD_ONE_PREEMPTION_THRESHOLD THREAD_ONE_PRIO
#define MAIN_THREAD_PRIO 5
#define MAIN_THREAD_PREEMPTION_THRESHOLD MAIN_THREAD_PRIO
/* USER CODE END PD */
Scheduler hazırlıklarını yaptıktan sonra app_thread.c içerisindeki App_ThreadX_Init fonksiyonu çağırılır. Threadlerimizin memorylerini allocateleyeceğimiz ve başlatacağımız yer bu fonksiyonun içerisidir. Öncesinde Threadlerin variablelarını ve entry pointlerini global da tanımlayalım.
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
TX_THREAD MainThread;
TX_THREAD ThreadOne;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
void MainThread_Entry(ULONG thread_input);
void ThreadOne_Entry(ULONG thread_input);
/* USER CODE END PFP */Şimdi threadleri oluşturabiliriz.
UINT App_ThreadX_Init(VOID *memory_ptr) {
UINT ret = TX_SUCCESS;
TX_BYTE_POOL *byte_pool = (TX_BYTE_POOL*) memory_ptr;
/* USER CODE BEGIN App_ThreadX_MEM_POOL */
/* USER CODE END App_ThreadX_MEM_POOL */
/* USER CODE BEGIN App_ThreadX_Init */
CHAR *pointer;
/* Allocate the stack for MainThread. */
if (tx_byte_allocate(byte_pool, (VOID**) &pointer,
APP_STACK_SIZE, TX_NO_WAIT) != TX_SUCCESS) {
ret = TX_POOL_ERROR;
}
/* Create MainThread. */
if (tx_thread_create(&MainThread, "Main Thread", MainThread_Entry, 0,
pointer, APP_STACK_SIZE,
MAIN_THREAD_PRIO, MAIN_THREAD_PREEMPTION_THRESHOLD,
TX_NO_TIME_SLICE, TX_AUTO_START) != TX_SUCCESS) {
ret = TX_THREAD_ERROR;
}
if (tx_byte_allocate(byte_pool, (VOID**) &pointer,
APP_STACK_SIZE_T2, TX_NO_WAIT) != TX_SUCCESS) {
ret = TX_POOL_ERROR;
}
/* Create ThreadOne. */
if (tx_thread_create(&ThreadOne, "Thread One", ThreadOne_Entry, 0,
pointer, APP_STACK_SIZE_T2,
THREAD_ONE_PRIO, THREAD_ONE_PREEMPTION_THRESHOLD,
TX_NO_TIME_SLICE, TX_AUTO_START) != TX_SUCCESS) {
ret = TX_THREAD_ERROR;
}
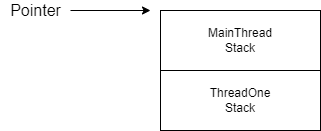
return ret;
}Bir thread oluştururken önce o thread için memory stack allocatelenir. Sonrasında threadi pointerın olduğu stackte başlatılır. Aşağıdaki figurde gösterilen pointer stacklerin giriş ve çıkışlarını tutmak içindir.
Threadlerin entry pointlerinin prototiplerini yukarıda yazmıştık şimdi fonksiyonlarını oluşturalım.
/* USER CODE BEGIN 1 */
void MainThread_Entry(ULONG thread_input) {
printf("Main thread started\n\r");
while(1){
printf("Green Toggled\n\r");
HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin);
tx_thread_sleep(100); // 1sn
}
}
void ThreadOne_Entry(ULONG thread_input){
printf("Thread One started\n\r");
while(1){
printf("Red Toggled\n\r");
HAL_GPIO_TogglePin(LED_RED_GPIO_Port, LED_RED_Pin);
tx_thread_sleep(200); // 2sn
}
}
/* USER CODE END 1 */Printf kodunu kullanmak için aşağıdaki eklentiler yapılması lazım. Extern ile başka bir dosyada olan variable bu dosyaya çekilebilir. app_thread.c içerisinde:
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
TX_THREAD MainThread;
TX_THREAD ThreadOne;
extern UART_HandleTypeDef huart1;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
PUTCHAR_PROTOTYPE {
/* Place your implementation of fputc here */
/* e.g. write a character to the USART2 and Loop until the end of transmission */
while (HAL_OK != HAL_UART_Transmit(&huart1, (uint8_t*) &ch, 1, 30000)) {
;
}
return ch;
}
void MainThread_Entry(ULONG thread_input);
void ThreadOne_Entry(ULONG thread_input);
/* USER CODE END PFP */Program çalışmaya hazırdır. Run tuşuna basıp programı yükleyebilirsiniz.
STM32 ThreadX’i ve ESP32 arasındaki iletişimi ve protokolleri kullanarak EMPA CLoud’a veri yollayabilen kod aşağıdaki linktedir.
Yukarıdaki dosyayı indirip .project dosyasına tıklayınız. Proje STM32CubeIDEnizde hazır olduğunda Run tuşuna basarak projeyi STM’e yükleyeniz.
Program Çalıştıktan Sonra board üzerinde Mavi ve Yeşil ledler yanıcaktır.
ESP32 amazona bağlandıktan sonra cihazınızın verilerini aşağıdaki linkten kontrol edebilirsiniz.
Dökümantasyonun devamı Workshop 2’de gelecektir.