



IoT & Sensor
Nesnelerin interneti (IoT) projelerinizde, birçok farklı pazar gereksinimine cevap verebilecek, alanında lider üreticilerimiz ve IoT özelinde uzmanlaşmış ekiplerimiz ile sizlere uçtan uca çözümler sağlayabilmekteyiz.
DAHA FAZLASI >
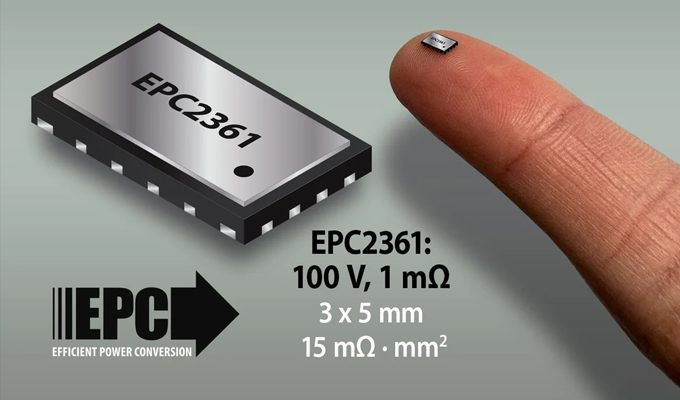
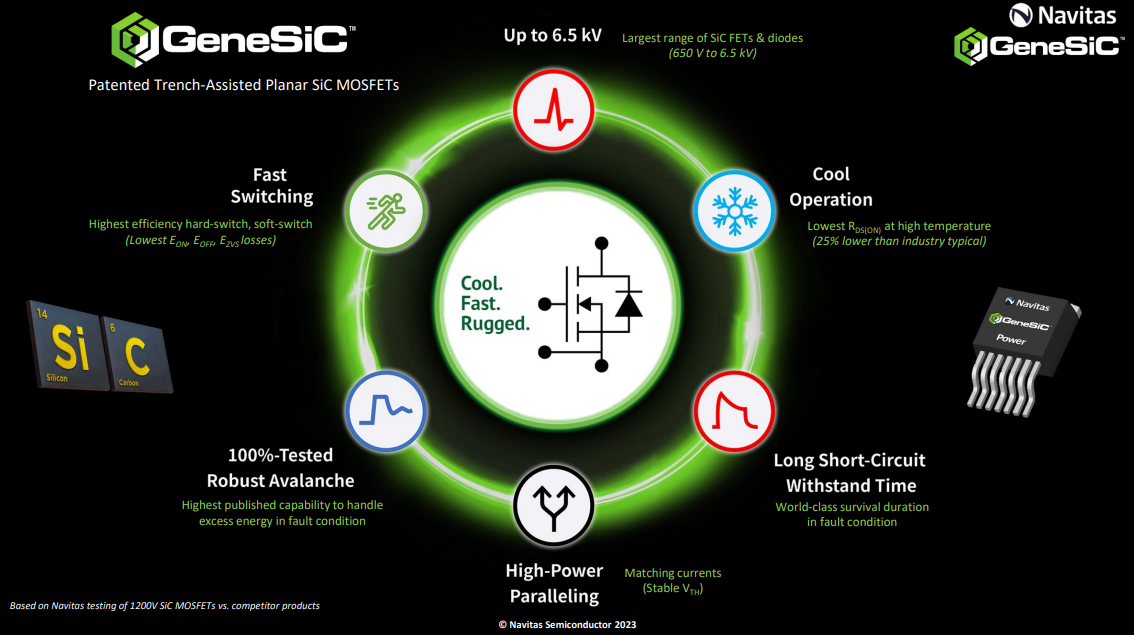
Power
Geleceğin ve inovasyonun en değerli parçalarından olan enerji çözümlerimiz ile yolunuza ışık tutmaya devam ediyoruz.
DAHA FAZLASI >
E-Mobility
E-mobility çevresel sürdürülebilirlik modellerinin başında yer alıyor. Fosil yakıtlara veda edeceğimiz yakın gelecekte çözümlerimizle tüm projelere destekler sunuyoruz.
DAHA FAZLASI >
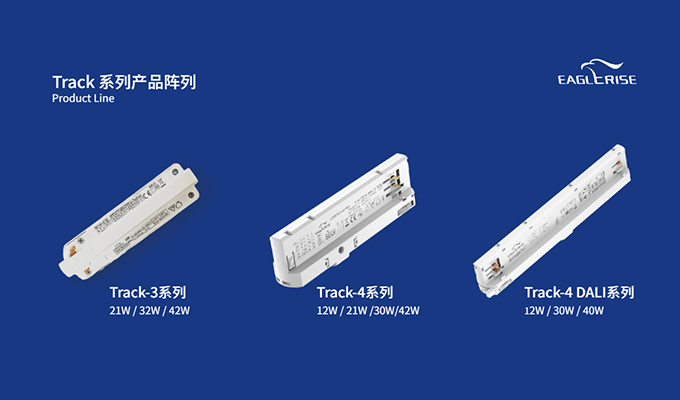
Lighting
Kaliteli, güvenilir ve uzun ömürlü aydınlatma ürünlerimiz ile yıllardır hem tedarikçilerimiz hem müşterilerimiz için çalışıyoruz.
DAHA FAZLASI >
AI & Cloud
Kaliteli, güvenilir ve uzun ömürlü aydınlatma ürünlerimiz ile yıllardır hem tedarikçilerimiz hem müşterilerimiz için çalışıyoruz.
DAHA FAZLASI >
Aerospace & Defance
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
DAHA FAZLASI >